صنعت آب با استفاده از درایوهای فرکانس متغیر برای ذخیره انرژی و بهبود کنترل
یک درایو فرکانس متغیر (VFD) یک دستگاه الکترونیکی با توانایی کنترل سرعت موتورهای القایی AC است.قبل از اینکه ما چگونگی کار آن را نگاه کنیم که چگونه می توان آن را استفاده کرد، ما باید تاریخ کنترل موتور نیز نگاه کنیم تا به چگونه کار کردن موتور القایی پی ببریم .
کنترل سرعت موتورهای الکتریکی در صنعت همواره مفید بوده اند.تقریبا هر فرایندی که با استفاده از یک موتور از کنترل سرعت بهره مند شوند، نه تنها روند به طور کلی بهبود می یابد بلکه در بسیاری از موارد (به خصوص با پمپ و فن) این صرفه جویی در انرژی قابل توجه است.
قبل از کنترل الکترونیکی موتور به روش های مختلف، به عنوان مثال با کنترل جریان ( درست در یک موتور DC با استفاده از یک سری از مقاومت ها، یا با استفاده از موتور دیگر ) کنترل می شد.با این حال، هنگامی که تریستور، نیمه هادی قدرت اول، در سال 1950 در دسترس قرار گرفت، این امکان برای کنترل ولتاژ آرمیچر، و در نتیجه سرعت، از یک موتور DC با استفاده از کنترل فاز انجام شد.این درایو DC هنوز هم تولید شده و در استفاده گسترده می باشد.
با این حال با کنترل سرعت موتور القایی AC همچنان در چالش بوده است که همچنین به عنوان موتور ناهمزمان شناخته شده است.در حالی که یک ماشین DC معمولا دارای دو بخش است آرماتور سیم پیچ و همچنین برس و یک کموتاتور، ماشین AC ساده است ،سیم پیچ ثابت (استاتور) و روتور.روتور معمولا از هادی تشکیل شده توسط ریخته گری آلومینیوم یا مس در هسته آهنی تشکیل شده است.این دستگاه در نتیجه ارزان تر، ساده تر و قابل اعتماد تر می باشد .این جای تعجب است که این دستگاه اکثر موتورهای مورد استفاده در صنایع در جهان را تشکیل می دهند.بنابراین چگونه کار می کند، و چرا به یک درایو فرکانس متغیر آن نیاز دارید؟
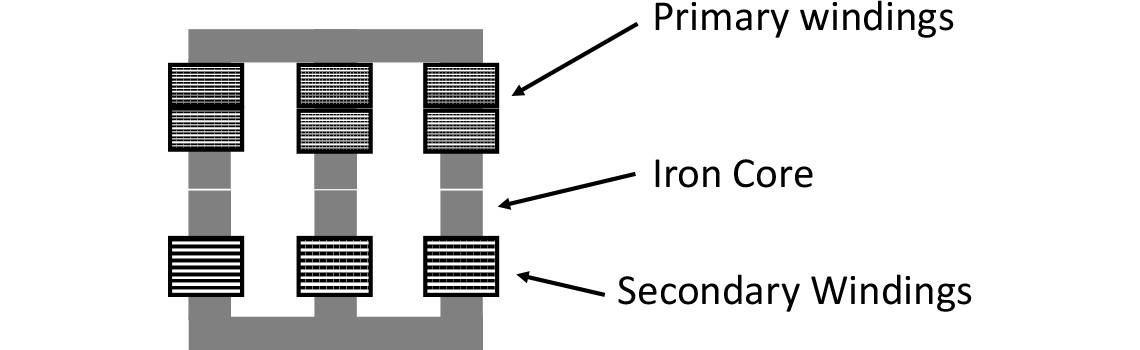
بیایید با نگاه به یک ترانسفورماتور سه فاز شروع کنیم ،
در شکل 1 نشان داده شده است:
شکل.1ترانسفورماتور سه فاز
اگر ترانسفورماتور سیم پیچ است که به یک منبع تغذیه AC سه فاز متصل شود، یک جریان سینوسی در سیم پیچ اولیه جریان خواهد شد.در حال حاضر باعث می شود یک شار مغناطیسی در هسته آهنی از ترانسفورماتور، که افزایش می یابد و به عنوان ولتاژ اعمال شده (و در نتیجه در حال حاضر) به تناوب، سقوط معمولا در 50 یا 60 هرتز، بسته به سیستم قدرت القا شود.
شار مغناطیسی تغییر پس از آن وادار یک ولتاژ در سیم پیچ ثانویه، و اگر یک بار متصل است (و یا حتی اگر سیم پیچ ها با هم اتصال کوتاه) یک جریان جاری خواهد شد.نسبت دور سیم پیچ اولیه و ثانویه را به نسبت ولتاژ اولیه و ولتاژ ثانویه، همین دلیل است که ترانسفورماتور هستند بسیار مفید تعیین می کند.
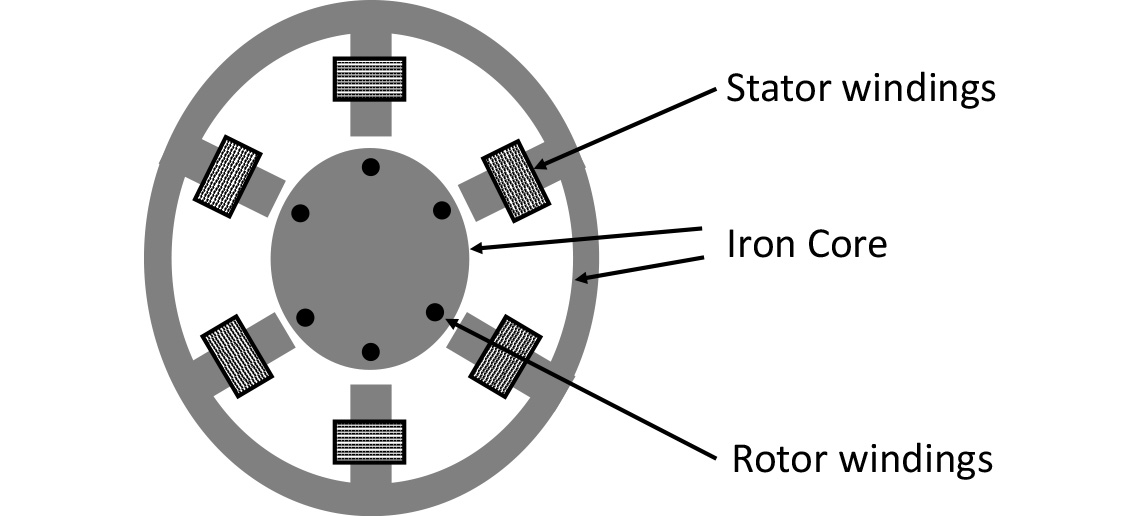
حالا تصور کنید که ما جمع کردن سیم پیچ، یک شکاف هوا کوچک بین آنها، و اجازه می دهد سیم پیچ ثانویه، در حال حاضر روتور نامیده می شود، به حرکت آزادانه.این اساس موتور القایی، نشان داده شده در شکل 2 است.
شکل.2بخش AC القایی موتور کراس
تا زمانی که ما یک منبع سه فاز به سیم پیچ اولیه اتصال - در حال حاضر به نام استاتور، ما باید عمل ترانسفورماتور مانند قبل، و جریان در روتور سیم پیچی (ثانویه).همانطور که در بالا ذکر شد، روتور معمولا از هادی بازیگران شامل در یک هسته آهنی با یک حلقه اتصال کوتاه در هر انتها.عنوان این ترتیب که یک کمی شبیه یک قفس دایره به نظر می رسد (نادیده گرفتن آهن البته!) موتور گاهی اوقات به عنوان یک موتور قفس سنجابی اشاره شده است.در شکل 2 هادی عمود بر نمودار، و حلقه اتصال کوتاه نشان داده شده است.
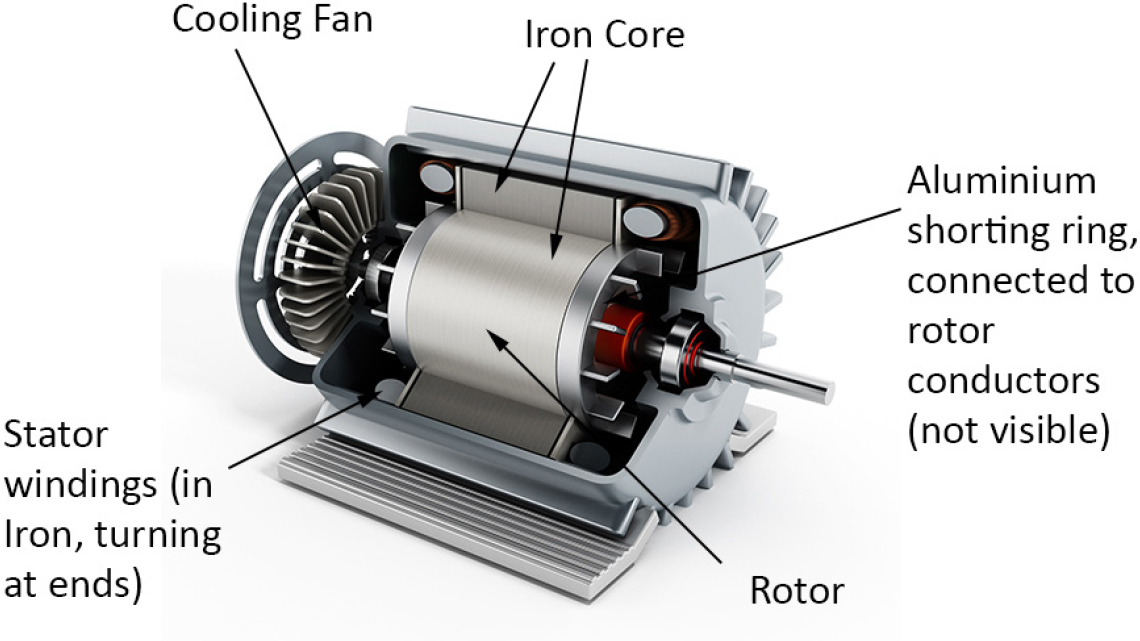
شکل 3 ساخت و ساز موتور نشان می دهد.
شکل.3موتور القایی برش دور
حالا اگر ما یک میدان مغناطیسی و جریان الکتریکی، ما یک نیروی، و با توجه به دست چپ فلمینگ قانون این روتور به نوبه خود، بنابراین ما باید یک موتور.با این حال، به عنوان موتور سرعت، شروع به 'عقب' با میدان مغناطیسی است که به طور موثر دوار - متناوب - در اطراف استاتور در فرکانس عرضه سه فاز.در حال حاضر ما تنها عمل ترانسفورماتور خواهد شد تا زمانی که میدان مغناطیسی به طور پیوسته تغییر؛ترانسفورماتور تنها با AC کار می کنند.بنابراین اگر روتور جلب تا با عرضه است، وجود دارد و دیگر یک میدان مغناطیسی در حال تغییر است، بنابراین هیچ عمل ترانسفورماتور، هیچ جریان روتور، و هیچ گشتاور وجود دارد.بنابراین یک موتور القایی استاندارد همیشه اجرا خواهد شد کمی کندتر از فرکانس استفاده می شود.این کاهش در سرعت به عنوان لغزش شناخته شده است.به عنوان یک موتور القایی لود شده است، لغزش را افزایش می دهد یک کمی، جریان بیشتری کشیده شده است، و موتور طول می کشد تا بار.بنابراین سرعت موتور اساسا وابسته به فرکانس اعمال شده است.در یک موتور القایی ساده، این سرعت به طور معمول خواهد بود چند درصد کمتر از سرعت سنکرون (که در آن هیچ گشتاور در دسترس است).
دو برابر شدن (یا trebling و غیره) تعداد دور یا جفت قطب اجازه می دهد تا این سرعت کاهش می یابد.بنابراین یک موتور با یک جفت قطب (یک موتور دو قطب) در حال اجرا در یک منبع (60) هرتز 50 در عمل می گویند 48 (58) دور در ثانیه، و یا 2880 (3480) دور در دقیقه.چهار دستگاه قطب، شایع ترین، بنابراین در 1440 (1740) دور در دقیقه اجرا می شود.شش و هشت موتور قطب به آسانی در دسترس، با برنامه های کاربردی متخصص نیاز قطب بیشتر با استفاده از موتورهای خاص.
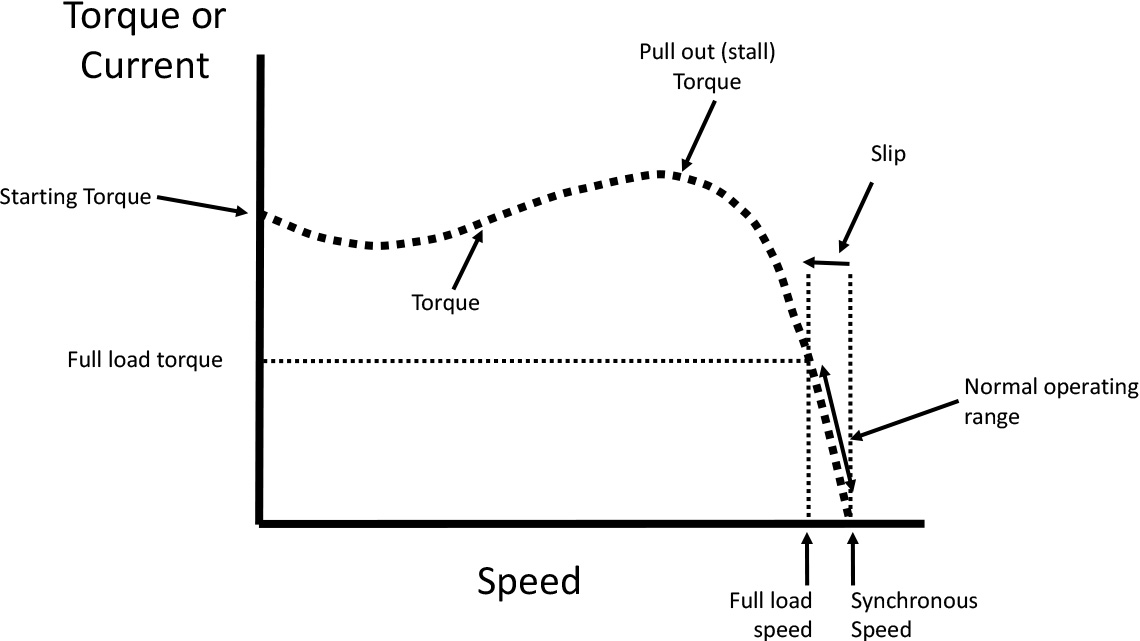
شکل 4 رابطه گشتاور / سرعت کلاسیک یک موتور القایی AC را نشان می دهد.
شکل.4گشتاور / سرعت مشخصه یک موتور القایی AC
بنابراین اگر ما می خواهید برای کنترل سرعت موتور که ما نیاز به تغییر فرکانس استفاده می شود.با این حال، اگر ما موفق به تغییر فرکانس، ما باید پس از ولتاژ به نگاه و همچنین، چرا که در حال حاضر مغناطیس در استاتور بستگی به انتگرال ولتاژ در طول زمان.این است که، سطح زیر منحنی شکل موج کاملا سینوسی.اگر فرکانس ما پس از آن دوره، یا طول افزایش موج سینوسی، به طوری که منطقه را کاهش دهد در زیر آن نیز افزایش می دهد و منجر به جاری مغناطیس بیش از حد در موتور.بنابراین اگر فرکانس ما را کاهش می دهد ما نیز باید ولتاژ اعمال شده به موتور به نسبت کاهش می دهد.
ما بحث در مورد چگونه ما انجام این کار الکترونیکی با یک درایو فرکانس متغیر در مقاله بعدی.





 تعمیر اینورتر | تعمیر درایو | عیب یابی درایو | هزینه تعمیرتعمیرات تخصصی انواع درایوها و سرو موتورها و ..
تعمیر اینورتر | تعمیر درایو | عیب یابی درایو | هزینه تعمیرتعمیرات تخصصی انواع درایوها و سرو موتورها و ..
 طراحی، ساخت و تعمیر انواع بردهای صنعتی
طراحی، ساخت و تعمیر انواع بردهای صنعتی
 اینورترهای برند lenze محصول کشور آلمان
اینورترهای برند lenze محصول کشور آلمان
 سرو اینورترهای Lenze سری i700
سرو اینورترهای Lenze سری i700 Inverter Drives 8400 protec EMS
Inverter Drives 8400 protec EMS Inverter Drives 8400 motec
Inverter Drives 8400 motec Inverter Drives 8400 TopLine
Inverter Drives 8400 TopLine Inverter Drives 8400 HighLine
Inverter Drives 8400 HighLine Inverter Drives 8400 StateLine
Inverter Drives 8400 StateLine Inverter Drives BaseLine
Inverter Drives BaseLine سرو درایوهای Lenze سری 9400 HighLine
سرو درایوهای Lenze سری 9400 HighLine موتور های سه فاز AC، سری MF
موتور های سه فاز AC، سری MF
 موتورهای هوشمند برند lenze ساخت آلمان
موتورهای هوشمند برند lenze ساخت آلمان
 اینورترهای برند MITSUBISHI محصول کشور ژاپن
اینورترهای برند MITSUBISHI محصول کشور ژاپن
 درایوهای میتسوبیشی سری FR - A800
درایوهای میتسوبیشی سری FR - A800 درایوهای میتسوبیشی سری FR - D700 SC
درایوهای میتسوبیشی سری FR - D700 SC درایوهای میتسوبیشی سری FR - E700
درایوهای میتسوبیشی سری FR - E700 اینورترهای میتسوبیشی سری FR - F800
اینورترهای میتسوبیشی سری FR - F800 درایو های برند EURA DRIVES تحت لیسانس آلمان
درایو های برند EURA DRIVES تحت لیسانس آلمان
 اینورتر یورو درایو سری E800
اینورتر یورو درایو سری E800 اینورتر یورو درایو سری E2000
اینورتر یورو درایو سری E2000 اینورتر یورو درایو سری IP 66
اینورتر یورو درایو سری IP 66